




Dans, Reinventing the Automobile, Personal Urban Mobility for the 21st Century, William J. Mitchell, Christopher E. Borroni-Bird et Lawrence D. Burns, repensent le concept même de voiture afin de faciliter la mobilité urbaine de demain. Selon ces experts du Massachusetts Institute of Technology, la voiture classique d’aujourd’hui est beaucoup trop large et trop lourde et ses options sont trop nombreuses pour offrir une mobilité urbaine efficiente. En effet, un véhicule classique :
- Est vingt fois plus lourd que son conducteur
- Son plein d’essence permet de rouler en moyenne 480 Km
- Dépasse les 100 Km/h
- Est garée 90 % du temps
- A besoin d’une place de stationnement d’environ 10m2 pour se garer

Ces formes d’inefficacité et ces pertes d’opportunités sont multipliées par l’énorme nombre de véhicules en circulation. Aux Etats-Unis, 250 millions de voitures et de camions parcourent plus de 4 mille milliards de kilomètres par an sur plus de 6 millions de kilomètres de route : leur consommation représente plus d’un tiers de la consommation annuelle d’énergie des Etats-Unis ! Par ailleurs, force est de constater la codépendance entre les villes et les voitures. La voiture s’est adaptée aux rues mais les rues se sont aussi adaptées aux capacités des voitures. En effet, la croissance du nombre de voitures en circulation a permis l’expansion des villes mais cette expansion urbaine a alors créé un forte demande de voitures.
Selon les chercheurs du MIT, les voitures électriques, intelligentes et connectées réalisent le meilleur équilibre entre la demande de voitures performantes et les besoins en terme de mobilité urbaine. Le voiture urbaine du futur sera donc moins SUV (Sport Utility Vehicle), et plus UVS (Ultra Small Vehicle). Un ultra small vehicle (USV) est un véhicule électrique qui mesure moins de 2,55 mètres de long et qui pèse 45 Kg maximum. Le bon point de départ est un USV à 2 places car un USV à une place offre une flexibilité limitée alors que les USV à 3-4 places sont trop larges, trop lourds et trop chers. En effet, selon les experts, le USV à 2 places offre le meilleur équilibre entre les exigences de l’environnement urbain et les besoins de mobilité des usagers. Le USV serait donc le véhicule le plus efficient pour répondre aux besoins de mobilité dans des centres urbains sur-congestionnés.
Par ailleurs, force est de constater que la voiture ne peut pas être définitivement détrônée par le vélo ou la moto. En effet, il existe un désir universel à tous les Hommes de posséder leur propre voiture. Cette dernière offre confort, sécurité, flexibilité et intimité puisque la voiture protège ses occupants de l’environnement extérieur et des autres usagers de la route, ce que ne peuvent procurer les deux-roues. Les experts sont unanimes : il faut conserver les caractéristiques clés de la voiture pour penser le véhicule urbain de demain.
La voiture électrique reste donc la meilleure approche en termes de mobilité urbaine puisque la plupart des véhicules électriques sont compacts et n’émettent pas de gaz à effet de serre. De plus, leur vitesse et leur autonomie limitées sont largement acceptables pour circuler dans les villes. Toutefois, la voiture électrique est deux fois trop lourde et trop large, et reste beaucoup trop rapide pour répondre aux besoins de mobilité urbaine puisqu’elle est conçue pour avoir les mêmes performances qu’une voiture à essence classique. Le Neighborhood Electric Vehicle, véhicule électrique généralement conçu pour ne pas dépasser les 40 Km/h, est une alternative intéressante pour répondre aux enjeux de la mobilité urbaine. Cependant, pour les experts, ce véhicule est encore trop grand : il gâche donc trop d’espace public pour se garer.
Cependant, selon les experts du MIT, la voiture électrique pourrait être rendue encore plus compacte si la mécanique était installée dans la partie centrale des roues : c’est le système du moteur-roue. Ce dernier permet de supprimer le pare-choc avant et la partie où se trouve le moteur habituellement, ce qui facilite grandement les manœuvres et le stationnement. Grâce au système du moteur-roue les voitures seraient ainsi deux fois moins larges que les NEV. De plus, le moteur-roue, couplé avec le système drive-by-wire grâce auquel chaque roue devient indépendamment contrôlable, pourrait jouer un rôle de générateur en récupérant l’énergie perdue lors du freinage par exemple pour réalimenter la batterie.
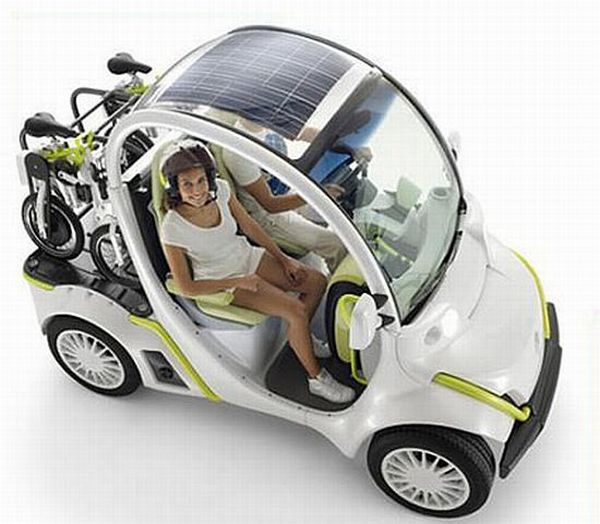
D’ailleurs, depuis quelques années, des concepts de mobilité personnelle et de petites citadines se développent, surtout chez les constructeurs Japonais. Cependant, ce sont des véhicules à une place qui ne répondent donc pas au besoin de flexibilité des propriétaires de voiture. Le USV apparaît donc comme un bon compromis entre les exemples de véhicules personnels et les véhicules actuels. D’un côté, le USV est plus utile que le véhicule personnel mais il est plus lourd, il consomme plus d’énergie et il coûte plus cher. D’un autre côté, le USV est moins cher, moins lourd et moins gourmand en énergie mais cependant moins flexible que le véhicule électrique classique.
Deux approches existent en terme de mobilité urbaine personnelle : la CityCar du Media Laboratory du MIT et le projet P.U.M.A. de General Motors.
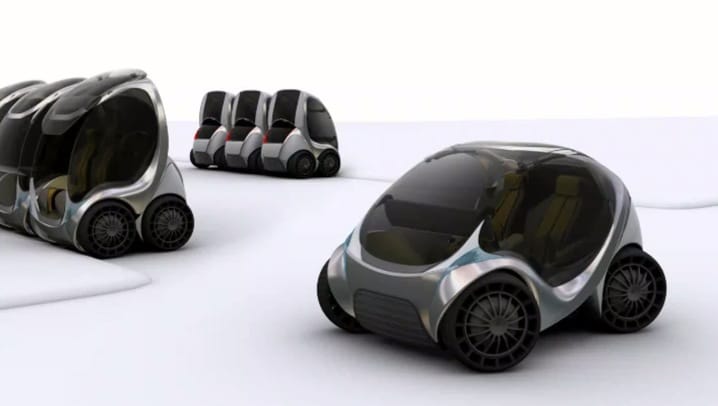
Le Media Laboratory du MIT a conçu un USV à 4 roues avec une configuration en rectangle ou en diamant. Chaque roue est autonome et est commandée numériquement ce qui offre au conducteur un large choix de manœuvre facilitant ainsi la conduite en environnement urbain. L’entrée et la sortie du véhicule sont à l’avant, permettant un gain de place lors du stationnement et offrant plus de sécurité puisqu’il n’y a plus besoin de sortir du véhicule côté route lorsque celui-ci est garé. Par ailleurs, le véhicule est « pliable », grâce à la présence d’un coffre à l’arrière du véhicule, le rendant plus compact lors du stationnement. De plus, ce système de repli permet également au véhicule de se remonter pour éviter les chocs. La conduite se fait avec deux joysticks – un pour chaque main – qu’il suffit de pousser vers l’avant pour faire avancer le véhicule, de pousser vers l’arrière pour freiner ou de pivoter pour guider le véhicule. Un écran plat sur la porte avant donne les mêmes informations qu’un tableau de bord classique. Par ailleurs, la faible masse et vitesse du véhicule ainsi que les détecteurs électroniques permettent de réduire drastiquement les accidents. La CityCar du MIT ne reste cependant qu’un prototype à l’heure actuelle puisqu’aucun modèle n’a été testé en conditions réelles.
Avec son projet P.U.M.A. (Personal Urban Mobility and Accessibility), General Motors a conçu un USV à moteur-roue qui ne tient que sur deux roues ! En effet, la stabilité du véhicule, habituellement apportée par les roues arrières, est maintenue électroniquement. Deux petites roues permettent cependant de maintenir le véhicule quand il est garé, afin de ne pas consommer la batterie, et une petite roue à l’avant permet de le stabiliser lorsqu’il est arrêté à un stop. Cet USV de deux places, dont l’entrée et la sortie se font par l’avant, peut rouler à une vitesse de 20 Km/h maximum et ne pèse que 45 Kg. En avril 2009, General Motors a testé son prototype dans les rues de New York. Ces USV électriques, connectés, compacts et très manœuvrable, facilitent la mobilité urbaine et permettent de réduire par quatre les besoins en stationnement. Par ailleurs, ils sont plus abordables qu’une voiture classique et ont un coût d’usage (essence, parking, maintenance) moins élevé. Il semble donc que le USV a le potentiel requis pour transformer fondamentalement la mobilité urbaine de demain.